-
My opinion about this:
The main problem with this ESC software seems to be, that is not able to deliver 400A continous but only 400A peak.
At 400A peak the real Amps seem to be only about 350Amps.
This causes, that the ESC work in high power partload, and this causes this very high temperature by switching losses.
And it also causes the loss of about 850rpm compared with ESC without this "regulation".
These aubout 5% will give you almost 5% less speed, means, with a full open ESC.
This means, you will get only 577km/h instead of the possible 605km/h with the setup.
of course also the weather conditions have to fit.
The seen 74% relative humidity at 23°C mean 9g/m² water in air.
For really fast speeds we found, that someone needs condition with les than 6g/m³ air.
anaway, the main problem is the ESC with it's high sofisticated software.
This is not needed for speed use.
Optimal ESC for speeding must be better stupid and strong.

~powercroco~
Really? So why is it that none of your planes ever flew 605 with YGE and your motor ???? These are ban-able questions on the German social media..
Good thing your opinions dont mean anything to science or George Ohm
How would an inverter with 20% higher internal resistance be more powerful at the same voltage? Makes zero sense if you understand electronics and can do math but you do things like extrapolate torque values of your motors using only the torque constant an amperage. See for you you would assume a Kw or 1 when its only.93 for your engines. You're only about 7% off everywhere in those calculations.... The other thing a power report doesn't tell you is what really happens at the prop. Remember your friends infallible Lehner that sucked more power for the same work. 🙈🙉🙊 It never occurred that the setup isnt optimal for 605 because it doesn't really do that with any inverter without hot wind behind it and the agnostic inverter isnt going to kill itself to push the noisy thumpers with idle currents as high as 18 amperes through. U do things like report the ETA at zero timing when your motors need as much as 30 degrees to give back the reported power numbers. I think your reply in Germany to Ron about the Americans that inquired about the lower ETA's that we were all just dumb country guys from Alabama and Illinois.... BUT.if ETA isnt important why did you skew those reports taking the measurements at zero degrees timing. The only person that's been false across all the forums is you. Now there is another excuse why your bifilar motors never pass 600.
Maxon's eq 1.92 was something you all presented to showcase your superiority in efficiency. It didn't become invalid until it placed you off the podiums.Comment
-
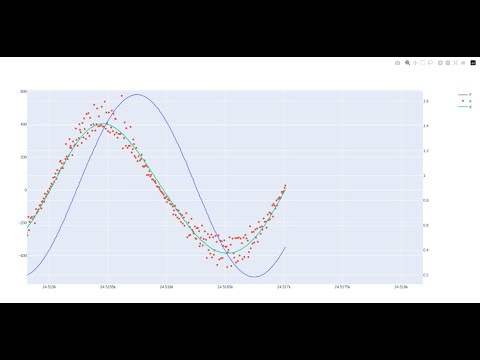
It will be something when Louis starts to show the generated wave forms of the motors for the reals to examine things like....power factor at load.Comment
-
A true electrical engineer and inverter designer can see why the YGE 320 would be limited. The old packaged 3 pin fets it uses have a high gate charge. Im comparison to new fets they are slow. so the gate charge value is high. The problem here is the gate current required at the pwm frequencies . Is for typical sinus inverter you have to account for the gate charge of 100% of fets at the pwm frequency. With a high gate charge per fet depending on the current capably of the fet driver bootstrap topology if the charge current of of the fet gates exceeds what the driver commands it wont have the switched speed to maintain the pwm. You cannot put many of those large slow fets in parallel and switch them at a pwm. Even though it is a fet that can sink large current individually you cannot run many in parallel for an ultra low on resistance and switch them at high pwm. The Telega based inverter can switch at a 48Kkz pwm and unlike most sinus drives it only switches 2/3rds of the transistors on at any moment of commutation so it more efficient. To do this it uses more modern faster switching transistors with much lower gate charge so you can run alot more in parallel and maintain adequate switching charge speed at much higher PWM. The gate charge iof the YGE fet is probably 2 to 3 times higher than The MYXA or an agnostic inverter like the APD.
Not trying to be funny but your post show me you really don't know anything about inverter design.
Regards
HubertAttached FilesComment
-
-

Oct 18, 2019
"Allows fully automated thrust tests with logging voltage, amperage, thrust, vibration, noise, temperature and air pressure. The tested motor, propeller and ESC combination produced 3.1 kg thrust at only 200 W and 5 kg at 380 W."
“I want to express my gratitude to you for such a successful controller, it really allowed to increase the flight duration of one of our production vehicles by 25%.”
- Lipovy Andrey (Chief Designer at Spaitech LLC)
- Helge Hackbarth (Managing Director at KopterKraft OÜ)
"We took a known problematic motor that would always get bogged down in rapid acceleration and skip and [Myxa] made it work. Quality is top notch […], no corners cut on that.”
- Ryan Johnston (CEO at Applied Aeronautics)
German social media is a trip!Comment
-
Comment
-
Truth be told......
When you do not know what your Q & D axis inductances are you really dont know anything about what the motor really does or how to appropriately tune the inverter to it as a complete power package.
Common sense would tell any EE at a glance and BOM the difference in an APD HV PRO versus a YGE 320. The differences in current path design at a power stage is also blaringly obvious 👁👁
Comment
-
Comment
-
And finally where really is the dumb and not so strong (20% higher internal resistance) YGE on teaching itself the optimal setups for the special speed props.
Watch it again....🙈
I want you to fully understand how antiquated that 15 year old brick its parts and its sinus algorithm is.....
If your friends are satisfied with its performance for 600.00 why they spend 1200.00 on us???
You made a claim so now there is a Simple solution for DZHAMEL'S Black Box Birds... send him your "dumber and stronger"YGE320 and record the 605km/h for the German social media and your believers on RC groups.... the place is absolutely worthless now for it's lack of accuracy or integrity on the subject matter from people such as yourself in the motor construction and high performance sections of the forum. I'm pretty sure that's why Tony doesn't even waste any more of his time answering the inane inverter questions there and why Louis Fourdan has to create a independent scorpion review page with truthful statistical reporting.Attached FilesComment
-
-
Uh - please Ralph doesn't want to appear precocious, but your statement is worth a closer look!
Of course, it's not possible on both sides of the coin without switching losses!
It is true that there is heavy switching in the partial load range (PWM 8Khz or higher) and this is of course where
switching losses occur (basically the largest!). Of course, this could be minimized by
making the switching edges finally small - but where would the rapidly increasing proportion of harmonics (against EMF) which in turn counterproductively
demands its share of our active power!
For “pure” inductors, the phase shift is 90° between current and voltage for sinusoidal current!
... fantastic conditions, NO reactive power! Unfortunately, our motors are far from achieving this and generate
a large amount of reactive power in the partial load range.
... here it comes:
With our controls (also rectangular) additional (undesirable) reactive power/reactive currents arise
due to harmonics with losses. These reactive currents actually flow through our
controllers (in addition to the active currents) and add up geometrically !
With "bad" (improperly manufactured...) motors, the cos_phi (ideal = 1) comes into play even more tragically,
which causes the proportion of reactive power to increase even further!
Now the fatal thing, the further we move from full load towards partial load, the larger the proportion of reactive load becomes and the
smaller the proportion of active load.... only - we only enjoy active power ...mmmh!
Only THAT generates our beloved torque...
This is also the reason that the measured pulse current is higher in partial load than under full load without PWM!
...and the controller MUST apply all of this at partial load and process it accordingly.
(You said: ... has little to do with the motor itself)
... some with huge heat sinks, some with a lot of know-how via software!
Summary: For me it's very clear - both systems have to be coordinated with each other for optimal operation and in this respect
~Gerd~
Its ashame the science doesnt reach you Ralph!Comment
-
And even he is wrong in some of his assumptions about Trap commutation which YGE DOES NOT USE in the first place!!!! but this illustrates the real value in your German social media page.Comment
-
Ha! I guess you are reading here . In turn...thats a nice edit Ralph so when your motor and YGE dont do 605you can safely back away from your mouth. I like that.... and the fact it never did it???. Can I interpret this to mean now that you & your friends you sell your motors to cannot fly and that is the > 600 barrier for Kai's 587 who has your motor and the YGE320?"My opinion about this:
The main problem with this ESC software seems to be, that is not able to deliver 400A continuous but only 400A peak.
At 400A peak the real Amps seem to be only about 350Amps.
This causes, that the ESC work in high power partload, and this causes this very high temperature by switching losses.
And it also causes the loss of about 850rpm compared with ESC without this "regulation".
These aubout 5% will give you almost 5% less speed, means, with a full open ESC.
This means, you will get only 577km/h instead of the possible 605km/h with the setup.
of course also the weather conditions have to fit.
The seen 74% relative humidity at 23°C mean 9g/m² water in air.
For really fast speeds we found, that someone needs condition with les than 6g/m³ air!
When the conditions are really optimal, someone can see results just like the 640km/h by Stan and the 623km/h by Tim and also the 353 km/h by a helicopter. We had these conditions only once in time in our competitions and only for les than 30min.
So actually Kai's both sides 587km/h in the 300m long WR -measuring distance with judges and proven by the high speed camera systems is still the fastest flight ever!
anyway, the main problem is the ESC with it's high sophisticated software.
This is not needed for speed use.
Optimal ESC for speeding must be better stupid and strong.
And the main factor for highest speeds is still the well trained and super talented pilot!"Last edited by powercroco; Today at 07:36 AM.
Oops
🙈🙉🙊Comment
-
Astonishing level at T-Motor F40 V | Page 2 | RC-Network.de
Dont hate Borat! Translate this thread and congratulate the work of other motors winders who produced better numbers than powercroco
Audiosmith wrote in response to all the hater aid from him.
That's how I see it too and it would have been over 6% if I had stayed with the same number of turns and used thicker wire.
Even at a moderate 45A with almost 80% efficiency, the improvement is certainly still over 3%, after all 1kW at 35g weight is still 1kW.
That's a power-to-weight ratio of 28.5 W/g, my Pyro1000 only manages 20 W/g at almost 80% Eta and we know that it's more difficult to get a good efficiency with small motors, that's what I mean by level, you can compare the value with your knockers
I guess you mean the DC, ok but you wanted to see it, I've already written that I don't think much of it.
But even if I set the voltage to 21V, it still has the 80% Eta at 40A and thus a power-to-weight ratio of 24 W/g and is therefore still 20% better than the big knockers.
The 250g limit has nothing to do with the engine and who says that I stick to it, the part also flies well with 300g so 90 g/dm2.
The 59A are the idle current at 22.2V, but they drop quickly with small batteries and with these props the current also drops in flight.
So I rather expect 47A at 21V, i.e. 1kW in flight at 300g flying weight and thus 3.3 kW/kg, so rather moddish compared to the more than 4 kW/kg for the Typhoon.
Yes, but the same thing happens with the knockers, you don't miss it with 20V, do you?
I measure a motor at the speed or voltage that is appropriate and sensible for the motor, i.e. where I will operate it, otherwise it makes no sense.
Haven't heard of Open yet, and it's up to you what you want to fly, at least yet, luckily you don't have anything to say.
But this is about engines and not about your sacred rule, why don't you open up a rule topic, you wouldn't be so lonely because there are many on it...
I'm sure it also plays a role, that's why it's about the same when compared to the Pyro 1000, otherwise I wouldn't have chosen it.
The 250g was secondary to create a frame, but you manage to cling to the frame instead of looking at the picture.Comment
-
Im certainly no "expert" but from a motor design standpoint how is the same wind on the same topology ever an improvement if it doesn't utilize the available iron and magnets any better? You can wind all the conventional wye and delta motors you may like and once you hit a full bobbin that's that. But none of that truly utilizes more magnet strength or available iron. On the same stator the only way you could do that is to lower those losses. The easiest way to do that is a hybrid wye to delta wind.Comment
-
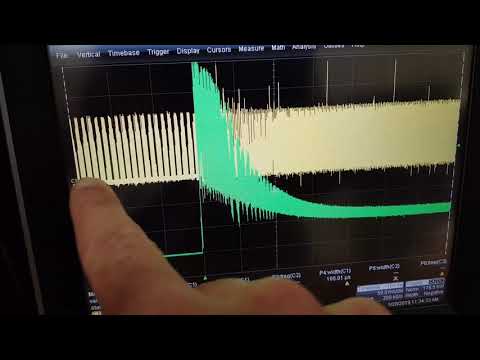
Now I want you to see just the APD F200 peak 350 @ 12s ampere easily....The inverter is 36 grams....
I need you to see how ridiculous the idea is that APD prevents you from flying >600km/h You see here for 72 grams in a dual inverter setup we can deliver 700 amperes to the motor at 12 s lipo without breaking the bank.Comment
-

You look at the control the sensor less inverter has You really have to be out of your mind to think the inverters are even in the same ball park.
Tony is very modest.Comment


You must Sign-in or Register to post messages in the Hobby Squawk community
Registration is FREE and only takes a few moments





Comment